Three-phase motors are primarily classified into two types: induction motors and synchronous motors.
Induction motors, which are the most common, work on the principle of electromagnetic induction.They are either squirrel cage or wound rotor designs.

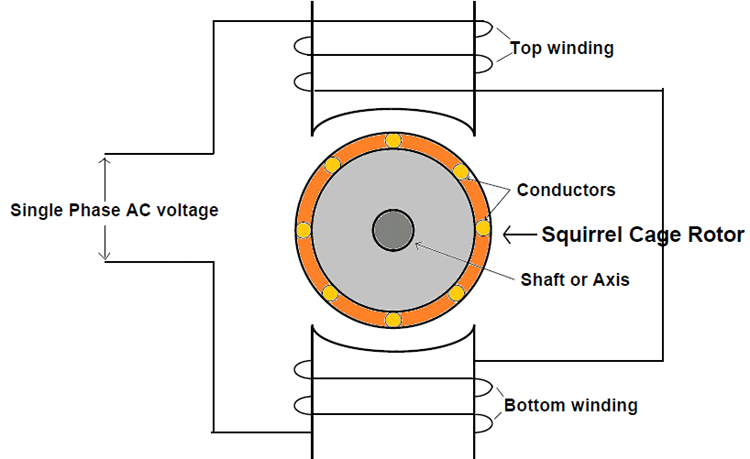
Squirrel cage motor
More than 80% of motors in the global industrial motor market use squirrel cage asynchronous motors.
A 7.5kW squirrel cage motor, with proper maintenance, can have an average lifespan of 15 to 20 years, while the lifespan of traditional slip ring motors is usually between 10 and 12 years.
The starting current of a squirrel cage motor is typically 6 to 8 times the rated current, and the starting time is generally controlled within 2 to 3 seconds.
The equipment failure rate of devices using squirrel cage asynchronous motors is only 2.5% per year, whereas the failure rate of devices using slip ring motors is as high as 8% per year.
The market price of a 15kW squirrel cage motor is about 1200 to 1500 USD, while the same power winding type motor costs over 2000 USD. The average maintenance cost of devices using squirrel cage motors in the first 5 years is about 500 USD per unit, while the maintenance cost of devices using winding motors during the same period reaches 1000 to 1200 USD per unit.
Squirrel cage asynchronous motors generally have a starting current that is 6 to 8 times the rated current. Taking a 45kW squirrel cage motor as an example, if a soft starter is installed, the current surge during equipment startup can be reduced by 40% to 60%.
The average operating noise of the SIMOTICS series high-efficiency squirrel cage motors has been reduced by more than 30%, while the power factor has improved to above 0.95.
Enterprises using squirrel cage asynchronous motors save an average of 12% in operating costs annually, while the motor failure rate has decreased by more than 25%.
Double Squirrel Cage Motor
The starting torque of a regular squirrel cage motor is typically between 150% and 250%, while the starting torque of a double squirrel cage motor can be increased to 300% to 350%.
When starting heavy-load steel billets, the starting time of a regular squirrel cage motor is 6 seconds, while the double squirrel cage motor only requires 4 seconds, with a 40% increase in starting torque.
The efficiency of a 30kW double squirrel cage motor during full-load operation can reach over 88%, while the efficiency of a regular squirrel cage motor is between 82% and 85%.
The average mean time between failures (MTBF) of a double squirrel cage motor can reach 120,000 hours, while the MTBF of a regular squirrel cage motor is typically between 90,000 and 100,000 hours.
The price of a 45kW double squirrel cage motor is usually 15% to 20% higher than that of a regular squirrel cage motor of the same specification. The total operating costs of equipment using double squirrel cage motors are 12% lower over three years compared to equipment using regular squirrel cage motors, while the production efficiency has increased by 8%.
Wound Rotor / Slip Ring Motor
The starting torque of a wound rotor motor can reach 200% to 250% of the rated torque, while the starting torque of a regular squirrel cage motor is typically between 150% and 180%.
By adjusting the speed with external resistance, the speed adjustment range of a wound rotor motor is typically between 50% and 100%, whereas the regular squirrel cage motor usually only allows minor adjustments between 80% and 100%.
The slip rings and brushes of a wound rotor motor require inspection and maintenance every 3000 to 5000 hours. Some models’ slip rings have a lifespan of over 20,000 hours.
A large sugar factory in Brazil reduced the equipment failure rate from 15% per year to less than 5% after using a wound rotor motor, saving approximately 200,000 USD annually in electricity costs. After using the wound rotor motor, the efficiency of the entire production line increased by 12%.
The initial investment cost of a wound rotor motor is usually 20% to 30% higher than that of a regular squirrel cage motor. In heavy-load starting scenarios, equipment using a wound rotor motor lasts about 25% longer than regular motors, and maintenance costs related to the motor are reduced by more than 15%.
Early wound rotor motors had efficiencies between 75% and 85%, but the new models now have efficiencies of over 90%. A 55kW wound rotor motor, when paired with a frequency converter, can save at least 10,000 kWh of electricity per year, which is equivalent to about 1500 USD in electricity costs.
For example, an Indian mining company invested about 100,000 USD in technical training and equipment debugging after introducing wound rotor motors. The equipment failure rate decreased by 40%, and the company ultimately achieved an ROI of more than 20%.
Synchronous motor
When the grid frequency is 50Hz, the synchronous speed of the motor is 3000 revolutions per minute (RPM).
When the load changes, the speed of a regular asynchronous motor may fluctuate by 3% to 5%, while the speed fluctuation of a synchronous motor is typically less than 0.1%.
High-power synchronous motors can have an efficiency of over 95%, while asynchronous motors of the same specification typically have an efficiency between 85% and 90%. A 500kW synchronous motor, after running for 8,000 hours continuously, can save about 50,000 kWh of electricity compared to an asynchronous motor.
In a real case, by replacing 6 asynchronous motors with synchronous motors, the company reduced its reactive power charges by about 15% each month, saving more than 120,000 USD annually.
Taking a 2500kW large synchronous motor as an example, if a variable frequency starter is used, the starting time can be controlled between 30 seconds and 60 seconds, whereas with traditional induction starting, the starting time may exceed 90 seconds, and the starting current may reach 6 to 8 times the rated current.
The initial procurement cost of synchronous motors is typically 15% to 30% higher than that of asynchronous motors. According to research data, after replacing a 1500kW asynchronous motor with a synchronous motor, the initial investment increased by about 100,000 USD, but it saved over 600,000 USD in total, achieving an ROI of more than 40%.
Synchronous motors with a brushless excitation system can have an average mean time between failures (MTBF) of 120,000 hours, while the MTBF of traditional excitation systems is typically between 80,000 and 90,000 hours.
Hysteresis synchronous motor
The synchronous locking time of a hysteresis synchronous motor is typically between 0.5 seconds and 2 seconds, while the synchronous locking time of a traditional synchronous motor may take more than 5 seconds.
The starting current of a hysteresis synchronous motor is relatively small, generally 2 to 3 times the rated current, while the starting current of a traditional synchronous motor can reach 6 to 8 times. A 0.5kW hysteresis synchronous motor has a starting current of about 2A to 3A, while the starting current of a traditional synchronous motor of the same power may reach over 10A.
The operating efficiency of a hysteresis synchronous motor is typically between 60% and 75%, which is lower than that of traditional permanent magnet synchronous motors (PMSM) and wound synchronous motors. Equipment using hysteresis synchronous motors has a speed error of less than 0.1%, while equipment using other motors may have speed errors of up to 0.5% to 1%.
The operating noise of a 1kW hysteresis synchronous motor is typically below 30 decibels (dB), while the operating noise of a traditional synchronous motor of the same power may exceed 45 dB. The yarn breakage rate in winding equipment using hysteresis synchronous motors is reduced by about 20%.
The maximum power of a hysteresis synchronous motor is typically no more than 10kW, while the power range of traditional synchronous motors can range from several hundred watts to several megawatts.
A case study from a Swiss watch company shows that after replacing the original permanent magnet synchronous motors with hysteresis synchronous motors, the procurement cost of each motor increased by about 20%, but the company saved over 150,000 USD in maintenance and replacement costs over the next five years.
Servo motor
The speed precision error of a regular asynchronous motor is typically between 1% and 5%, while a servo motor can control the error within 0.01%. A 25kW servo motor can provide precise position feedback thousands of times per second.
For example, in a medical robotic surgery application, the robotic arm driven by a servo motor can be accurate to 0.1 millimeters. At the same time, the startup time of a servo motor is typically within 50 milliseconds, while traditional motors may require more than 200 milliseconds.
After using a servo motor to drive an assembly line, the door assembly error rate decreased from 3 errors per thousand doors to less than 1 error per thousand doors.
The efficiency of a servo motor is typically above 90%, while the efficiency of a traditional asynchronous motor is typically between 80% and 85%. For an electronics manufacturing company, after replacing with servo motors, the company saved about 60,000 USD in electricity costs per year, and production efficiency increased by more than 12%.
A 55kW servo motor has a total operating cost that is about 15% lower over 5 years compared to a traditional motor of the same specification.
In sorting robots in the logistics industry, a servo motor can sort thousands of packages per minute with an accuracy rate exceeding 99%.
In the field of industrial automation, the market demand for servo motors is growing at about 8% annually, and it is expected that by 2030, the global market for servo motors will exceed 25 billion USD.