Table of Contents
ToggleRotating Magnetic Field
Rotational speed in a rotating magnetic field is specified by the current frequency and also the number of poles that this motor possesses. Assuming a connected four-pole motor with the power supply has an oscillation value of 50 Hz, to find the synchronous speed as per the relation n = 60 × f/p the result comes as 1500 RPM.
An 11 kW motor is normally applied in large water pumps or fans, and its efficiency would be better than 90%. Compared with single-phase motors, three-phase motors will have energy efficiency more than 20% higher.
Statistics show that the average life span of modern three-phase motors is roughly about 15-20 years. Now, if a 500 kW motor operates for 12 hours per day, or about 4380 hours annually, its maintenance costs are roughly between 5% and 10% of the total costs. The general tendency is for the maintenance cycle of the motor to be once every 1000 hours.
By doing so, an industrial motor of 1000 kW may save about 100,000 RMB on electricity each year if its average annual efficiency is greater than 95%. Motors with IEC criteria for production have less than a 0.5% failure rate.
The starting current of high-power motors is usually 3-5 times higher than the normal operating current. In many factories, soft starters or variable frequency drives are commonly used to smoothen the process of start-up. Employing a soft starter, for instance, lowers the surge current at the time of start-up by around 30% and reduces the power loss.
According to different market research reports, the three-phase motor market crossed US$25 billion in 2023, with over 40% share contributed by the Asian market. It is very likely to continue to grow at an annual rate of more than 10% in the next few years.
After renovation, a saving in electricity cost for a 100 kW motor system is up to 30,000 RMB per year, and the return on investment is usually reached within 2-3 years. For a large shopping mall with a centralized air-conditioning system, the COP can be improved by some 15% when using three-phase motors.
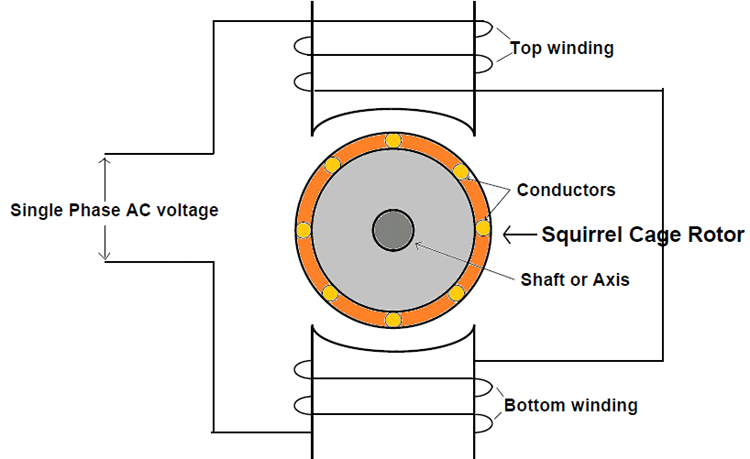
Stator and Rotor
Three sets of windings on the stator are mounted 120 degrees apart and carry currents from different phases. Thus, for a power frequency of 50 Hz, the normal synchronous speed of rotation of the magnetic field in the stator of a three-phase motor is 1500 RPM.
The efficiency of a squirrel-cage rotor is usually over 90% for a 4 kW motor. A wound rotor is more appropriate for large motors and when variable speed and high load are required.
For a 500 kW motor operating at full load, the output power of the stator needs to be 105% of the rated power of the motor. Generally, the temperature rise of the stator winding cannot exceed 80%-90% of the rated temperature.
The initial current of the rotor is 4-7 times larger compared to the normal current in running condition. For a 10 kW motor, both the rotor and stator must be designed for larger load capacities to prevent excessive fluctuation in the output power of the motor. If the efficiency of the motor is below 90%, over 10,000 RMB will be wasted annually due to low efficiency.
In a large pump station motor of 700 kW, liquid-cooled stators and high-precision bearings can keep the temperature rise of the motor within the standard limit after 6,000 hours of continuous operation. A typical 15 kW industrial motor, using high-quality copper wire and low-loss silicon steel sheets, can improve the motor’s efficiency by about 2%-5%.
For some high-speed motors-e.g., 20,000 RPM high-speed machine tool motors-mechanical power loss as much as 15 percent can be accounted for if the rotor happens to be out of balance.
Current Phase Difference
Each of the three-phase currents generated in a three-phase AC power supply is of 120 degrees phase difference from. The current passing through the first winding produces a magnetic field in the stator; then, with a time delay of 120 degrees, the second winding produces a second magnetic field, and the third winding, with a time delay of 240 degrees, produces a third magnetic field. This phase difference of 120 degrees in the generated magnetic field keeps it rotating continuously and thus rotates the rotor.
For a typical 5 kW three-phase motor, besides a phase difference of 120 degrees, the output power of the motor will dramatically decline. For industry applications, the general efficiency of a three-phase motor lies between 85% and 95%.
Due to the phase difference, a three-phase motor can maintain a relatively steady operating state within a large range from 0% to 100% load. For a 10 kW three-phase motor, the phase difference can reduce the current surge at startup. The starting current of a three-phase motor is 3-5 times its normal running current.
During various conditions of load, the 400V, 50Hz industrial motor keeps its phase difference of currents at 120 degrees. Usually in high power three-phase motors, a power factor as high as 0.9 or more is allowed. In long running of industrial motor 30 kW, unequal load will generate its overheating on its stator winding.
Generating Torque
A three-phase, 15 kW motor produces 50 Nm of maximum torque at full load. The starting torque of an industrial three-phase motor rated at 30 kW can be as high as 150% to 200% of the rated torque during startup.
For each additional 10% of current, the motor’s output torque increases by 5%-7%. The lower the rotor resistance, the faster the rotor will respond – it will take less time for the rotor to develop higher torque.
A 10% increase in load requires an approximate 5%-7% increase in torque in order to maintain the speed constant. For example, it requires the motor torque in a 500 kW water pump drive application not to have jumps throughout the operating cycle; otherwise, it might lead to pump vibration, pump damage, or loss of efficiency.
By precise design, the torque fluctuation rate of some high-efficiency motors can be controlled within 5%-8%. In three-phase motors, at rated speed, normally 1500 RPM, the torque is maximum, and at 2000 RPM, the torque drops about 10%-15%.
Startup and Operation
When starting, a three-phase motor will draw a current that is 3 to 7 times the rated operating current. As an example, consider a 15 kW industrial motor having a starting current of more than 4 times the rated current, which may reach as high as 60 amps.
In the case of an 11 kW motor using star-delta starting, the starting current of the motor is approximately one-third of the direct-on-line starting current. The speed of the motor after starting increases gradually, the current decreases, and it finally switches to delta connection.
A soft starter can control a 5 kW motor to have its current rise rate within 2 to 3 seconds at the instance of starting. A VFD controls the motor’s speed by changing the input frequency.
For a 50 Hz three-phase motor, the rated speed is usually 1500 RPM. For a 10 kW motor, when the load increases by 20%, its output torque rises by 10%-15%.
An additional 15 kW-rated current protection device is usually set. If the current of the motor exceeds the rated value by 10%-20%, the protection device will automatically cut off the power supply. There are normally temperature sensors on the motors that monitor the working temperature of the motors in real time and prevent overheating.
It is generally higher than 90% at 80% of the motor load. For high-power motors, it approaches 95% while running at full load.
Under high temperatures, the starting current could reach up to 3.5 times the rated current. Most industrial applications make use of cooling devices for maintaining a reasonable temperature for their motors.
Some automated production lines use VFDs for precise motor speed regulation in a wide range of 0-1500 RPM with high efficiency and stability in operation.

Achieving Forward and Reverse Rotation
The rotation direction of the 7.5 kW three-phase motor will be changed by changing the phase sequence of the power supply. It takes only a few seconds.
In a crane motor system, the speed of the motor can be reversed from clockwise to counterclockwise in 1 second by interchanging two phases of the power supply, thereby allowing the lifting and maneuvering of goods.
Modern motor control systems are typically provided with protection devices that prevent current surges in case of phase sequence switching. For example, a 22 kW industrial motor may be destroyed by inappropriate protection system since the switching of the phase sequences could result in a current surge of 2-3 times the rated current and thus destroy the motor and electrical equipment.
In applications requiring precision reversal, besides changing the phase sequence, a variable frequency drive is often used to adjust the motor’s speed. For example, in a high-precision automation assembly line, it may be necessary to fine-tune the speed of the motor in both forward and reverse directions, and a VFD can control the motor speed between 500 RPM and 1000 RPM during forward and reverse operations.
The most used control system includes soft-start technology between the forward and reverse rotation to decrease the impact at startup for the motor. Soft starters decrease the starting current for every 5 times rated current approximately down to 1.5 times on a 15 kW motor, as a means of not sending excess currents with each switching phase.
In the design of motors, usually the progressive speed control technology is adopted to avoid mechanical shock. For example, in the process of forward-reverse switching of a VFD-controlled motor, the change rate of speed is usually within 10%-20% for smooth transitions of the equipment.
In some tractors or agricultural machinery, the forward-reverse action of the motor must be combined with load switching to guarantee that adequate torque is available when running in reverse. As an example, a 60 kW agricultural irrigation pump motor usually has to give at least 80% of rated load torque when running in reverse to ensure a normal flow of water.